
Projects
Showcasing student research and STEM innovations.
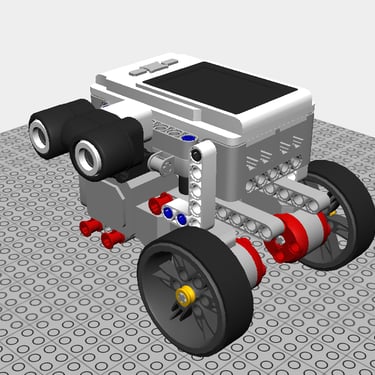
Self-Parking Car
Trimester 1 "2025-2026"
This Self-Parking Car project uses a ZMROBO chassis and an Ultrasonic Sensor to automate precision maneuvers. Programmed in Python, the system continuously calculates the distance between the vehicle and surrounding obstacles. When an empty parking spot is detected, the onboard controller triggers a pre-defined sequence of steering and throttle adjustments. This simulates real-world autonomous driving technology by processing sensor data to avoid collisions. The code employs if-else logic to determine when the car is safely "boxed in" or centered. It’s an excellent project for exploring robotics kinematics and spatial awareness. By fine-tuning the Ultrasonic sensor thresholds, you can achieve a perfect reverse park every time. This DIY build bridges the gap between basic hobby electronics and advanced AI transport systems.




Project prepared by group:
Class 11D: Peri Amir -Sara Waleed -Rawan Abd El Mohsen
Under the supervision of: Mr. Hussein Elmasri
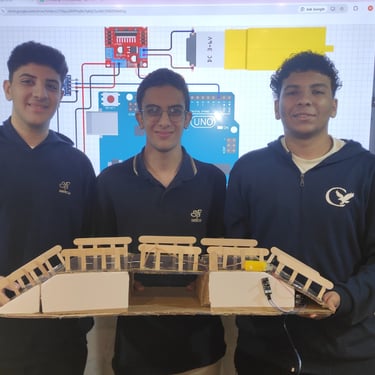
Smart Bridge
Trimester 1 "2025-2026"
This Smart Arduino Bridge project uses an IR sensor to automate the movement of a drawbridge or toll gate. When a vehicle or boat is detected by the infrared beam, the Arduino processes the signal and triggers a servo motor. The servo then rotates to a specific angle, smoothly lifting the bridge or opening the gate to allow passage. Once the sensor no longer detects an object, the system initiates a timed delay before closing back to its original position. This mimics real-world civil engineering automation used in modern infrastructure. Programmed in C++, the project focuses on precise motor control and sensor calibration. It’s an ideal STEM demonstration for understanding input-output logic in robotics. By adding an LED signal light, you can also simulate a "Stop/Go" traffic system. Build this to explore the intersection of electronics and structural design!



Project prepared by group:
Class 12C: George Ramy - Joseph Wael - Mostafa Ahmed
Under the supervision of: Mr. Hussein Elmasri
Smart Electronic Gate
Trimester 1 "2025-2026"
This Smart Electronic Gate project uses an IR sensor and a servo motor to create a fully automated entry system. Designed using PictoBlox, this project utilizes block-based coding to detect arriving vehicles or pedestrians via infrared signals. When the IR sensor's beam is interrupted, the Arduino triggers the servo to rotate 90 degrees, physically lifting the gate arm. After a short programmed delay to allow passage, the gate automatically lowers back to its "locked" position. This simulation mimics real-world automated parking lots and high-security building entrances. PictoBlox makes it easy to visualize the if-then logic required for sensor-to-actuator communication. You can even add a "Welcome" message on the stage or a buzzer sound to enhance the user experience. It is a fantastic STEM activity to learn about input-output hardware. This project bridges the gap between digital code and physical movement!








Project prepared by groups:
Group 1 (4 Balmoral): Siraj Eleslam - Abanoub Ashraf -Layla Mohamed -Justin Marco - Ahmed Hamza -Hana Moustafa - Omar Sherif
Group 2 (4 Oxford ): Lucia Bassem - Nathalie Mina - Carla Ebrahem - Natalie Joseph - Marola Ehab - Hunya Mohammed
Group 3 (5 Belfast): Dalida Shehab - Nataly Moudy - Ashly Micheal - Rita Andre - Lilly Ibrahim - Salma Mohammed
Group 4 (5 Balmoral): Parthenia Sherif - Mila Mena - Carla Fady - Tia Wessam - Hebaallah Ashraf - Kamilaa Mohamed - Youssef Remon
Group 5 (Grade 5): Asia Marwan - Jana Ahmed - Marly Michael - Lara Hesham - Nouf Abdelaziz - Taleen Yehia
Group 6 (Grade 6): Julia Mahmoud - Sofya Mahmoud
Group 7 (6 Leeds): Rafael Sherif - Adam Shady - Mark Michel
Group 8 (6 Oxford): Joseph Basem - Pierre Mina
Under the supervision of: Ms. Elaria Nashat
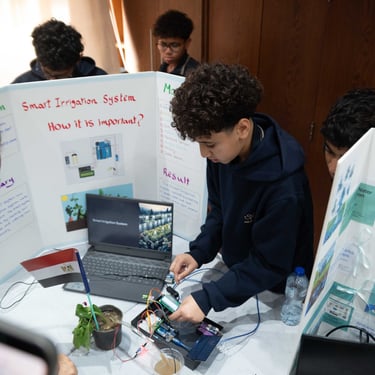
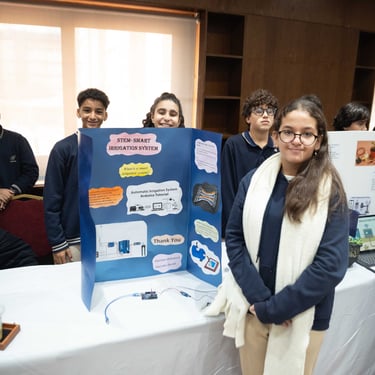
Smart Irrigation System
Trimester 1 "2025-2026"
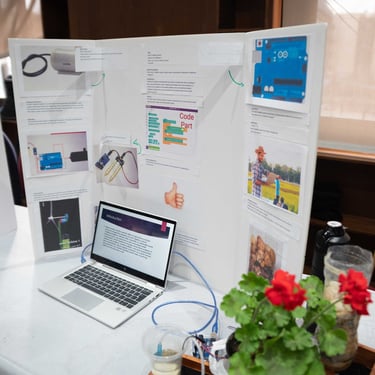
This Arduino-based Smart Irrigation System automates plant watering by monitoring soil moisture in real-time. Using a capacitive soil moisture sensor, the system detects when the earth is dry and triggers a submersible water pump via a relay module. This ensures plants receive the exact amount of hydration needed, preventing both underwatering and water waste. The project is programmed in pictoBlox, utilizing threshold logic to maintain optimal soil conditions. It is an ideal sustainable STEM project for home gardens or indoor potted plants. By integrating an I2C LCD, you can even display live moisture percentages and pump status.



Project prepared by groups:
Group 1 (class 7A): Giano Remon - Linore Goerge – Miven Maged – Lara Mohamed Mariam. Jan
Group 2 (class 7A): Mariam Yehia – Adam Tamer – Antoine Ramy – Daniel Shady
Group 3 (class 7B): Selim Ahmed – Philopateer Sherif – Karas Ehab – Adham Wael
Group 4 (class 7B): Maroska Sherif – Mariam Mohamed – Karas Karam
Group 5 (class 8): Jino Philip – Farha Abdallah – Karma Mohamed
Under the supervision of: Ms. Martina Mikhail
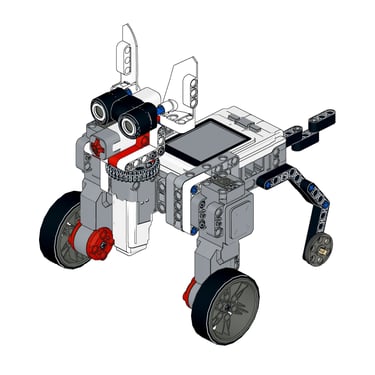
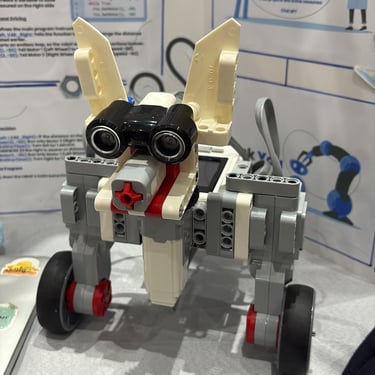
Robotic Guide Dog
Trimester 1 "2025-2026"
This Robotic Guide Dog project uses a ZMROBO chassis and Ultrasonic Sensors to navigate safely as an assistive device. Programmed in Python, the robot acts as a mobile navigator by detecting obstacles in its path using high-frequency sound waves. The onboard controller processes distance data in real-time to execute autonomous steering and collision avoidance maneuvers. This simulates the behavior of a real guide dog by maintaining a safe "buffer zone" around the user. The code uses conditional logic to determine when to stop, turn, or slow down based on proximity. It is an advanced STEM project that combines robotics kinematics with empathetic technology. By mounting the sensors at varying heights, the robot can detect both ground-level and waist-high hazards. This DIY build serves as a functional prototype for AI-driven mobility aids. It highlights the potential of accessible robotics to improve independence for the visually impaired. Explore the future of human-robot interaction with this smart navigation system!



Project prepared by group:
Class 11B: Roger Youanis - Faredah Khaled -FARES HAZEM - Jessy Adel - Judy Mostafa -Miray Abraam
Under the supervision of: Mr. Hussein Elmasri
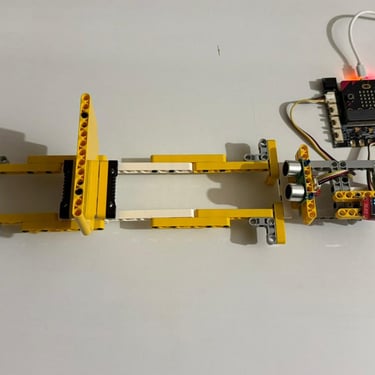
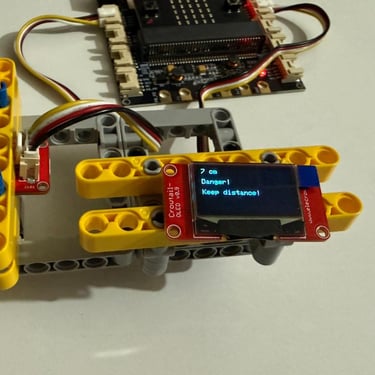
Distance Display
Trimester 1 "2025-2026"
This BBC micro:bit Distance Display project uses an ultrasonic sensor to measure real-time proximity. Programmed in Python (MicroPython), the system sends a high-frequency sound wave and calculates the distance based on the echo's return time. The resulting data is then formatted and sent to an OLED display via the protocol for a clear, digital readout in centimeters. This setup eliminates the need for a bulky laptop screen to see your sensor values. It’s a perfect STEM project for learning about wave physics and external peripheral integration. The code handles the timing math to convert microseconds into a readable distance. By using the microbit’s edge connector, you can easily bridge the sensor and screen into one compact device. It is an ideal foundation for building digital tape measures. This build highlights the power of Python in handling hardware interrupts and data visualization!


Project prepared by group:
Class 11A: Catherine Nashaat - Hamza Mohamed - Hanya Mohamed - Lojin Walid - Rahma Tamer -Thomas Wael - Julie romany
Under the supervision of: Mr. Hussein Elmasri
Smart Greenhouse
Trimester 1 "2025-2026"
This Smart Greenhouse project uses PictoBlox and Arduino to automate climate control for healthy plant growth. By integrating a DHT11 temperature sensor, the system constantly monitors the ambient air conditions. When the temperature exceeds a specific threshold, the Arduino triggers a DC fan via a motor driver or relay to cool the environment. This project teaches the fundamentals of feedback loops and environmental automation in a beginner-friendly way. Using PictoBlox’s block-based coding, you can easily visualize the logic without worrying about complex syntax. The system ensures that plants are protected from overheating even when you aren't around. It is an ideal sustainable STEM project for exploring agricultural technology. You can also add an LCD to display real-time humidity and heat levels. This DIY build perfectly demonstrates how IoT can be applied to modern farming. Build your own mini-ecosystem and watch your garden thrive with automated precision!




Project prepared by groups:
Group 1 (5 Windsor): Jwayiria Mahmoud - Karim Amr - Melina Nabil - Youssef Mostafa - Karim Rafik -youness Khaled
Group 2 (6 Balmoral): Eyad Alaa - Hamza Ashraf - Kirollos Micheal - Raphael John
Under the supervision of: Ms. Elaria Nashat
Smart Assistive Glasses
Trimester 1 "2025-2026"
These Smart Assistive Glasses use an Arduino Nano and Ultrasonic Sensors to provide spatial awareness for the visually impaired. Programmed in C++, the system calculates the distance to nearby obstacles by measuring high-frequency sound wave reflections. When an object is detected within a specific range, the Arduino triggers a haptic vibration motor or a piezo buzzer mounted on the frames. The frequency of the pulses increases as the user gets closer to an obstacle, providing real-time feedback. This wearable tech project simulates the "echo-location" found in nature to prevent collisions. Its compact design allows it to be mounted on standard eyeglass frames for hands-free use. By using threshold-based logic, the code filters out distant objects to avoid "noise" and focus on immediate hazards. It is a powerful STEM project that demonstrates how robotics can solve real-world accessibility challenges. This DIY build serves as a low-cost, functional prototype for assistive navigation technology.


Project prepared by group:
Class 12C: George Ramy - Bishoy Nader
Under the supervision of: Mr. Hussein Elmasri
Rain Protector Project
Trimester 1 "2025-2026"
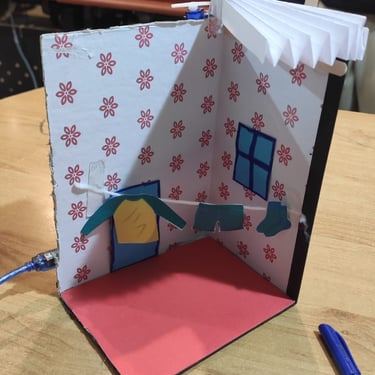
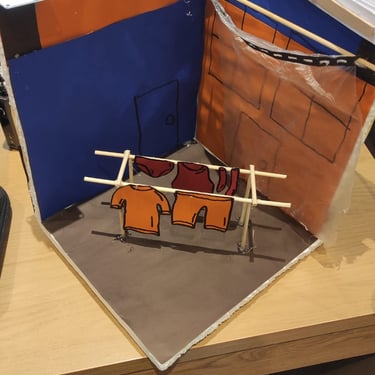
This Arduino-based project is a smart solution for protecting laundry from sudden rain. Using a Rain Sensor a Servo Motor with C++ Programming, the system acts as an automated "shield" for your clothesline.
When the sensor detects moisture, it triggers the Arduino to rotate the servo, which can pull a retractable plastic cover over the washing or physically pull a drying rack under a roof. Once the sensor dries, the system can be programmed to retract the cover, allowing the clothes to continue air-drying. This setup is perfect for preventing "musty" re-washes and demonstrates a practical application of automated home robotics.
Core Components: Arduino Uno, Raindrops Sensor Module, and a high-torque Servo Motor.
Logic: The sensor outputs an analog signal; if the value drops below a set threshold (detecting water), the servo activates.
Benefit: Saves time and energy by eliminating the need to manually monitor the weather.



Project prepared by groups:
Group 1 (class 9A): Nour Fadi – Gasser Sayed – Anthony Hany -Mohamed Tamer
Group 2 (class 9B): Kirollos Ramy – Karen Goerge – Mirolla Heshmat – Yassin Ahmed – Yousab Essam
Group 3 (class 10D): Mariam Mohamed – Yasmine Farid – Irene Boushra – Violet Hany
Group 4 (class 10D): Haneen Mohamed - Jana Tamer – Daniel Ramy – Jonathan Milad
Under the supervision of: Ms. Martina Mikhail
Obstacle Avoiding Car
Trimester 1 "2025-2026"
This Obstacle-Avoiding Car project uses a BBC micro:bit and an ultrasonic sensor to navigate autonomously. Programmed in Python, the car constantly emits sound waves to "see" its surroundings and calculate distances to nearby objects. When a barrier is detected, the micro:bit triggers a logic sequence to stop, reverse, or turn the motors, preventing a collision. Real-time sensor data providing a live "dashboard" for the robot's brain. This build demonstrates the fundamentals of autonomous vehicle technology and robotics kinematics. The code utilizes MicroPython to manage motor PWM signals and high-speed sensor interrupts simultaneously. It is a perfect STEM project for learning about feedback loops and spatial awareness in coding. By mounting the sensor on a servo motor, you can even create a "scanning" radar effect for better pathfinding. This DIY car bridges the gap between basic electronics and complex AI navigation. It’s an engaging way to explore how machines make real-time decisions in a dynamic environment!


Project prepared by group:
Class 11C: Catrine Maged - Eyad Ayman - LOJIN TAMER - Mariam Bassem - Salma Youssef
Under the supervision of: Mr. Hussein Elmasri
Smart Elevator
Trimester 1 "2025-2026"
This Smart Arduino Elevator project automates vertical transport using a DC motor and an IR sensor for floor detection. Programmed in C++, the system uses the IR sensor to identify when the elevator cabin has reached a specific level, signaling the Arduino to stop the motor. A time-based delay is integrated into the code, allowing the "doors" to remain open for a set duration before the cabin moves again. This simulates real-world industrial automation found in high-rise infrastructure. The project utilizes a L298N motor driver to control the direction and speed of the lift. It is an excellent STEM project for learning about limit switches and precise motor calibration. By adding push buttons, you can create a fully interactive multi-floor calling system. The logic focuses on state-machine programming to ensure the elevator doesn't overshoot its destination. It’s a perfect DIY build to explore the intersection of mechanical pulleys and electronic logic. Build this to master the basics of robotic vertical motion!







Project prepared by group:
Class 12: Mohamed Fady - Justin Heshmat - Lavina Gamel - Karen Wael
Under the supervision of: Mr. Hussein Elmasri
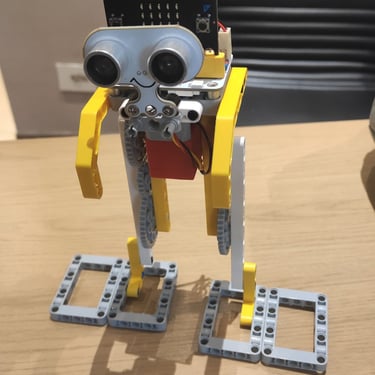
Bigfoot Robot
Trimester 1 "2025-2026"
This Bigfoot Humanoid Robot project uses a BBC micro:bit and ZMROBO chassis to create an intelligent walking assistant. Programmed in Python (MicroPython), the humanoid utilizes an ultrasonic sensor to "see" its environment and navigate around obstacles autonomously. A built-in OLED display acts as the robot's face, showing real-time status updates, distance readings, and expressive animations. The system uses servo motors to coordinate stable, bipedal movement, simulating human-like walking patterns. This project explores advanced robotics kinematics and sensor fusion, making it a standout STEM challenge. The Python code manages the complex timing required for balance while simultaneously processing high-speed sonar data. It is an ideal platform for studying human-robot interaction and assistive technology prototypes. you can easily integrate the screen and sensors for a compact, wire-free build. This DIY humanoid bridge the gap between simple toy robots and functional AI-driven companions. Transform your coding skills into physical motion with this impressive bipedal machine!

Project prepared by group:
Class 11E: Mariam Alaa - Malak Ahmed - Lamar Alaa
Under the supervision of: Mr. Hussein Elmasri
Contact
Reach out with questions or project ideas.
© 2026. All rights reserved.